Architecture Overview¶
Quad-SDK is a layered, message-driven stack. Each layer is a ROS 2 package with clear input/output topics, so individual layers can be swapped or studied in isolation.
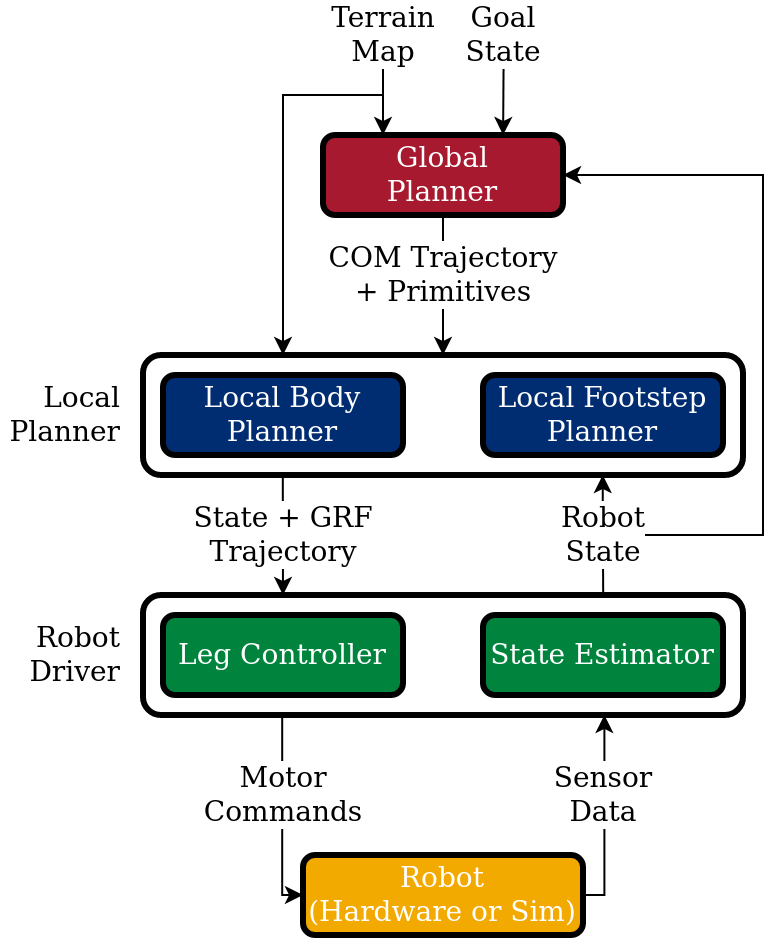
The hierarchy¶
flowchart TB
subgraph PERCEPTION[Perception]
TM[terrain_map]
end
subgraph PLAN[Planning]
GP[global_body_planner<br/>RRT-Connect + leaps]
LP[local_planner<br/>NMPC body + Raibert footstep]
NMPC[(nmpc_controller<br/>library)]
end
subgraph CONTROL[Control + estimation]
RD[robot_driver<br/>control loop]
EKF[state_estimator<br/>EKF]
BFE[body_force_estimator]
end
subgraph EXEC[Execution]
HW[hardware_interface]
SIM[Gazebo / MuJoCo / IsaacSim]
end
TM --> GP
TM --> LP
GP -- global_plan --> LP
LP -- local_plan --> RD
LP <-.uses.-> NMPC
RD -- joint_cmd --> HW
RD -- joint_cmd --> SIM
HW -- joint_state, imu --> EKF
SIM -- joint_state, imu --> EKF
EKF -- state/ground_truth --> LP
EKF -- state/ground_truth --> GP
EKF -- state/ground_truth --> RD
EKF -- state/ground_truth --> BFE
RD -- joint_cmd --> BFE
BFE -- external_wrench --> LPLayer summary¶
| Layer | Frequency | What it produces | Where it lives |
|---|---|---|---|
| Multi-robot coordination (optional) | per goal change | Conflict-free per-robot global plans | conflict_based_search |
| Global plan | 5–20 Hz | Path of body states + GRFs to a goal | global_body_planner |
| Local plan | 333 Hz | 26-step NMPC body plan + footstep schedule | local_planner |
| NMPC | called per local-plan tick | OCP solution (states, GRFs) | nmpc_controller |
| Control | 500 Hz | Per-joint torque/PD commands | robot_driver |
| Estimation | 500 Hz | Body state + foot contacts | robot_driver |
| External wrench | 100 Hz | Disturbance estimate | body_force_estimator |
| Simulation | 1–2 kHz | Joint states, IMU, contacts | quad_simulator |
For multi-robot scenarios, the conflict_based_search node sits above the per-robot global planners and coordinates them via the plan_with_constraints service. See the Multi-Robot tutorial.
Topic conventions¶
All robot-scoped topics are namespaced as /robot_<id>/<topic>. Multi-robot configs (see CBS demos) replicate the full stack under each namespace.
| Topic | Type | Producer → Consumer |
|---|---|---|
state/ground_truth |
quad_msgs/RobotState |
estimator → planners, driver |
global_plan |
quad_msgs/RobotPlan |
global → local planner |
local_plan |
quad_msgs/LocalPlan |
local planner → driver |
foot_plan_continuous |
quad_msgs/MultiFootPlanContinuous |
local planner → driver |
terrain_map |
grid_map_msgs/GridMap |
perception → planners |
cmd_vel |
geometry_msgs/Twist |
user → local planner |
control/mode |
std_msgs/UInt8 |
user → driver |
Full message definitions: quad_msgs.
Launch composition¶
The runtime is composed by launch files under quad_utils/launch/ rather than monolithic config:
# Single-robot
quad_gazebo.py ─┐
├── robot_bringup.py ── robot_driver.py
quad_mujoco.py ─┘ (per-robot)
quad_plan.py ──── planning.py ──── global_body_planner_node
├── local_planner_node
├── body_force_estimator (optional)
└── logging (optional)
# Multi-robot
quad_multi_gazebo.py ── robot_bringup.py × N (one per robot)
multi_robot.py ──── planning.py × N (per-robot stacks)
├── conflict_based_search_node (central coordinator)
└── logging_cbs.py × N (optional, --logging_cbs:=true)
Single-robot scenarios pass a robot_configs JSON list with one entry; multi-robot scenarios pass an N-robot list with each robot's goal_state field set. robot_bringup.py iterates and stamps namespaces. The CBS coordinator only runs in the multi-robot path. See:
quad_utils/launch/quad_gazebo.py(single)quad_utils/launch/quad_multi_gazebo.py(multi)quad_utils/launch/multi_robot.py(per-robot planning + CBS)quad_utils/launch/logging_cbs.py(per-robot CBS-debug bagging)
Module deep-dives¶
- ROS 2 migration — what changed from ROS 1, what to update if you're porting code.
- Pinocchio integration — how the kinematics/dynamics layer was rewritten.
Design choices worth knowing¶
Why NMPC as a library?
nmpc_controller builds a CasADi/IPOPT solver once at startup and exposes a synchronous solve(). The local planner calls it directly so we avoid the latency and brittleness of a separate ROS node round-trip per control tick.
Why split global vs. local planning?
Global search (~hundreds of milliseconds, RRT-Connect) and local refinement (~3 ms, NMPC) live on different timescales. Splitting them lets each be tuned and replaced independently.
Why three simulators?
Each backend earns its place. Gazebo Harmonic is feature-rich (sensors, physics plugins, fluid contact) and covers every platform. MuJoCo is fast, deterministic, and renders without a GPU — ideal for headless training rigs and perf tests. NVIDIA IsaacSim 5.1 (beta) brings high-fidelity rendering and GPU-accelerated scenes for the Spirit 40 and Go2 — it needs a separate IsaacLab conda install; see Running in IsaacSim. The controller and planning stacks run unmodified across all three. See the simulator support matrix.